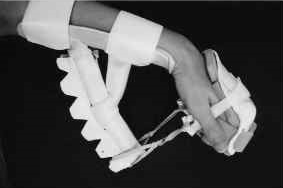
The ‘Dinosaur Orthosis’: An Orthosis for Static Progressive or Dynamic Wrist Flexion and Extension.
Recently the Practice Forum of The Journal of Hand Therapy featured the orthotic design, the “Dinosaur” orthosis. This is a static progressive or dynamic orthosis for patients with limitations in wrist flexion or extension.
www.jhandtherapy.org for subscribers… Arnold, S., & Janson, R. (2017). Wrist extension or flexion mobilization orthosis: The dinosaur design. Journal of Hand Therapy, 30(1), 109-112.
The authors explain, step-by-step, how to fabricate this orthosis, which can be applied in both directions to help patients regain passive wrist motion. This orthotic design is not new to most therapists, but the easy to follow format of the fabrication steps could be of help. The tension force on the metacarpal bones must be positioned at a 90° angle, which explains the height of the outrigger.
We would recommend Orfit Flex NS 3.2 mm for this specific design. Do remember to remove the coating and use dry heat for secure bonding.
As the ‘Dinosaur orthosis’ is rather bulky, heavy and may not appeal to all patients, we suggest some alternative orthoses below.
Thermoplastic Hinges: Eliminating the Need for Rivets in Mobilization Orthoses.
In 2012 an alternative design was published on the Practice Forum of the Journal of Hand Therapy. Schwartz, D. A. (2012). Thermoplastic Hinges: Eliminating the Need for Rivets in Mobilization Orthoses. Journal of Hand Therapy, 25(3), 335-341.
This similar type of orthosis is less cumbersome, easier to fabricate and easily removed by the patient.
For this orthosis we suggest Orfit Colors NS 2.0 mm.
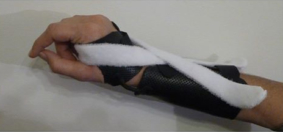
Velcro or Elastic strap: an orthosis designed by Jean-Christophe Arias.
This design places a wide Velcro or elastic strap across the dorsum of the hand, which pulls the wrist into flexion, or on the volar palm, which pulls the wrist into extension.
This design was fabricated with Orfilight Black NS 2.5 mm and Orficast for the hinges.
The latter two orthotic designs both feature wrist hinges of thermoplastic material. Preventing compression of the wrist carpal and forearm bones by maintaining the distance at a constant. This allows for a sleek and low profile design where the wrist can be pulled into the desired direction in its protected axis of motion.


Written by Debby Schwartz, OTD, OTR/L, CHT
Physical Rehabilitation Product and Educational Specialist at Orfit Industries America.
Debby is a certified hand therapist with over 36 years of clinical experience. She completed her Doctorate of Occupational Therapy at Rocky Mountain University of Health Professions in 2010. She has worked at Orfit Industries America as Product and Educational Specialist since 2007.
Debby is also an adjunct professor at the Occupational Therapy Department of Touro University, School of Health Sciences, and at the Occupational Therapy Department at Yeshiva University, Katz School of Science and Health in NYC. She has written many book chapters in the field of hand therapy and multiple articles for hand therapy journals, including the ASHT Times and the Journal of Hand Therapy. She has published a new textbook on orthotic fabrication together with Dr. Katherine Schofield, entitled “Orthotic Design and Fabrication for the Upper Extremity: A Practical Guide”.
Debby’s Google Scholar
Contact us for more product information or find your local distributor here.

If you’d like to receive the latest product updates and interesting Orfit news, subscribe to our newsletter: